Table des matières
Quadrirotor
Définition
“Un quadrirotor est un aéronef à voilure tournante comportant quatre rotors pour sa sustentation. Les rotors sont généralement placés aux extrémités d'une croix. Afin d'éviter à l'appareil de tourner sur lui-même sur son axe de lacet, il est nécessaire que deux hélices tournent dans un sens et les deux autres dans l'autre sens. Pour pouvoir diriger l'appareil, il est nécessaire que chaque couple d'hélices tournant dans le même sens soit placé aux extrémités opposées d'une branche de la croix.” Wikipedia
Manoeuvres
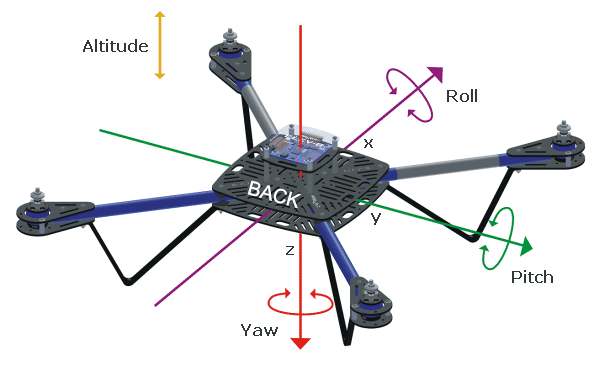
Thrust
La poussée ou le thrust est la force totale produite par la rotation des 4 hélices.
Pitch
L'inclinaison vers l'avant ou l'arrière qui permet d'avancer ou de reculer et qui est provoquée par l'augmentation de la poussée à l'avant ou à l'arrière.
Roll
Comme le pitch sur le coté.
Yaw
Rotation autour de l'axe vertical provoquée par l'accélération d'hélices opposées. On décélère les 2 autres hélices pour conserver la poussée globale.
Composants
Vitaux
Le châssis
On peut acheter le châssis en kit ou le faire maison. Contrairement à ce que l'on pourrait penser l'équilibrage du châssis n'est pas primordial. Si il est déséquilibré alors les asservissement pourront le compenser. Les châssis sur internet sont assez fiables si on les achète en se fiant aux avis et ils sont peu chère il n'est donc vraiment pas nécessaire d'en faire un soit même. Mais c'est possible il y a plein de tutos sur internet.
Les tailles de châssis sont standardisées. 250mm, 450mm, 550mm etc…